MOTORS & VFDs
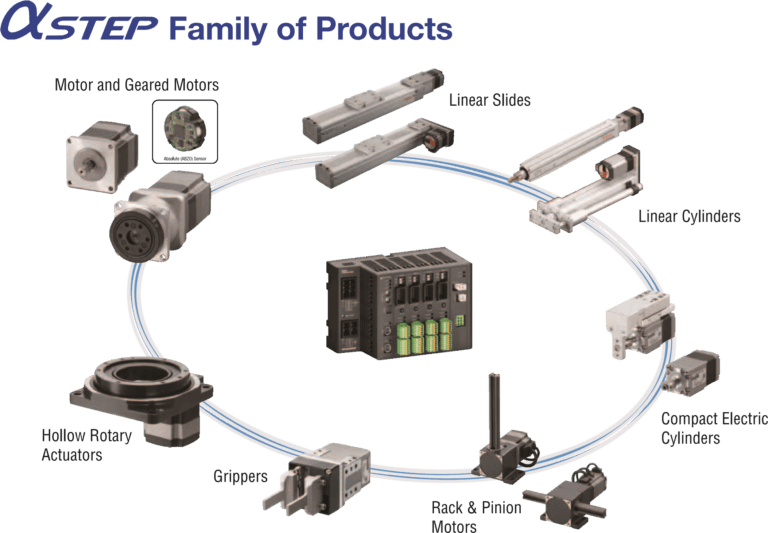
Industrial Robots for Manufacturing
Omron’s robotics lineup includes Collaborative Robots, SCARA, Mobile and Parallel robotics – all designed to help manufacturers meet today’s production demands and automation challenges.















Download the whitepaper.
Download the ebook.

Download the ebook.